The latest iniVation DV Software version 1.3.1 now features enhanced support for multi-camera applications. DV now directly supports systems combining both iniVation neuromorphic DVS and frame-based machine cameras from leading manufacturers (e.g. FLIR, Basler) and is supported on both Linux and Mac. Vision pipelines containing both frames and events can now be built directly in DV, including native stereo rectification of events and frames for higher accuracy and faster calibration.
With DV 1.3.1, multi-camera algorithms such as sensor fusion and depth reconstruction are now faster to build than ever before. Applications benefiting from this enhanced functionality including real-time, high-speed robotics, human tracking, autonomous vehicles, and more.
About DV
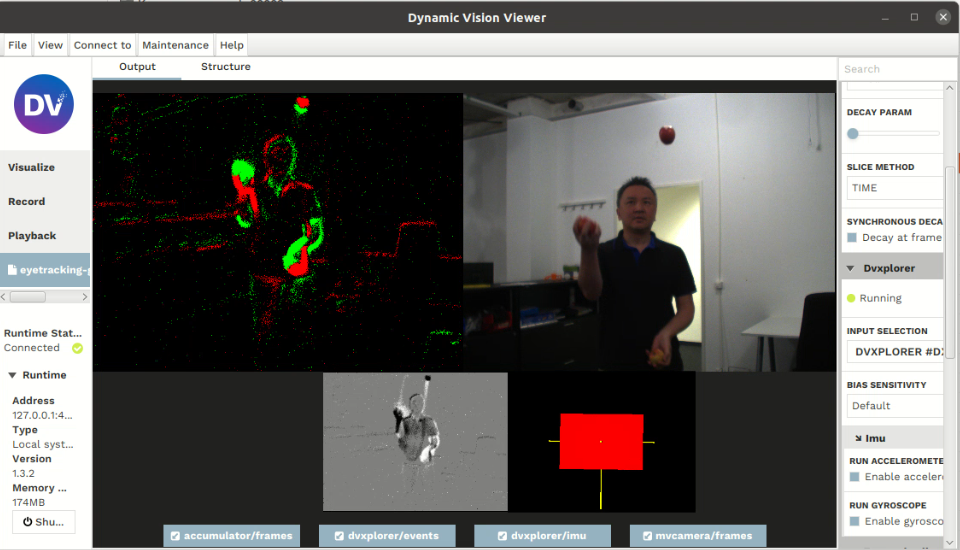
The iniVation DV software enables rapid real-time development of high-performance vision applications. It combines live visualization and recording with a powerful modular, extensible runtime framework. DV works directly with all iniVation neuromorphic cameras, as well as selected frame-based cameras from leading third-party producers.
DV provides multi-platform support, with a high-performance runtime ready to deploy directly to embedded and IoT devices. It allows you to combine dozens of pre-delivered modules into applications, as well as develop applications rapidly using a user-friendly SDK API including extensive documentation and code examples.